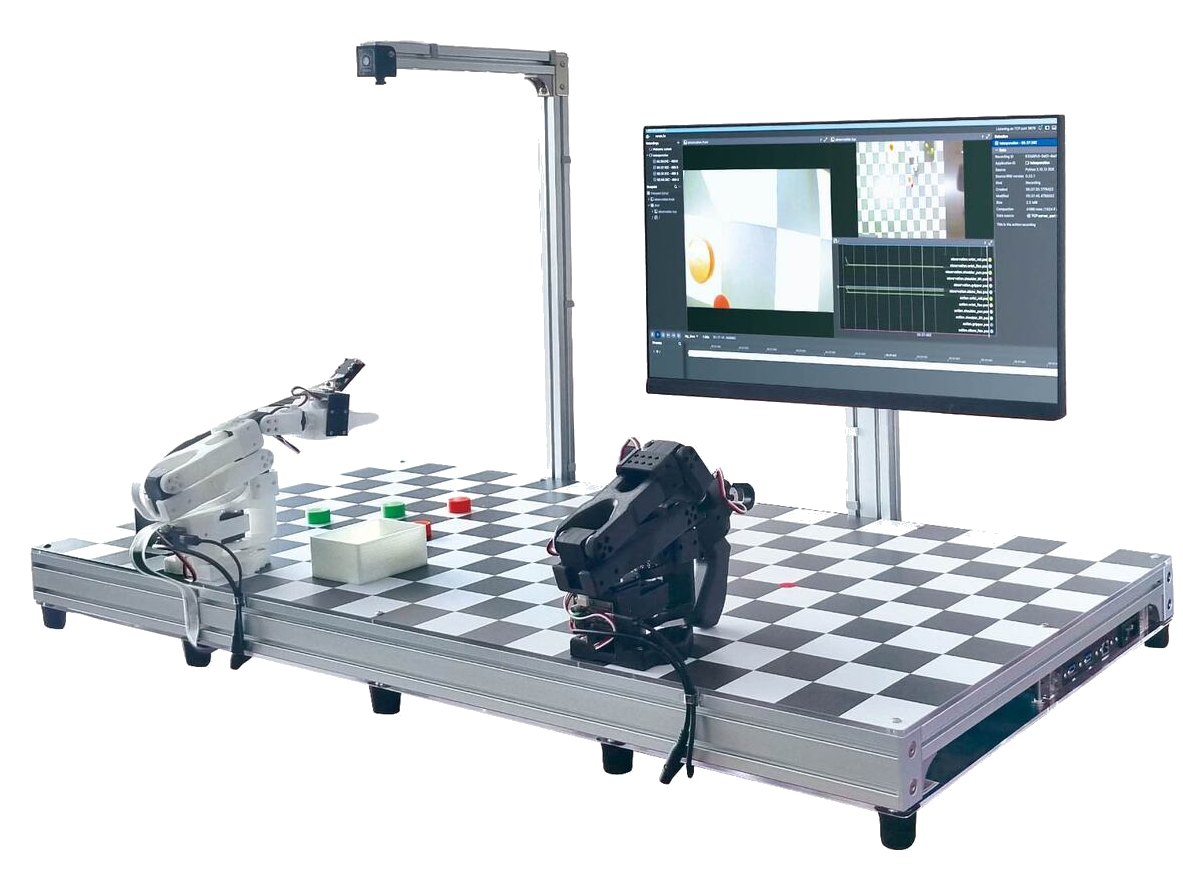
- Physical AI robot training equipment consisting of two 6-axis robotic arms, an intelligent robot controller, and a work cell base.
- Enhanced mobility and expandability by placing the leader robot & follower robot separately on detachable aluminum profile base.
- GUI-based data viewing, labeling, and replay are possible through the monitor, camera, & microphone included in leader robot area.
- Vision calibration, AR marker segmentation, and pose estimation pipelines can be configured through the follower robot and the two cameras in the follower robot area.
- Camera-based vision grasping enables robust gripping even with changes in lighting conditions.
- An intelligent robot controller integrating the ROS 2 open-source stack, supporting both leader-follower and imitation learning/ reinforcement learning for robots.
- Enables integration with generative AI such as diffusion policies, VLM/VLA, and prompt-based control.
- Provides teleoperation data collection and Behavior Cloning-based block pick-and-place examples.
- Provides NVIDIA Isaac Sim-based digital twin examples.
|